Smart ToyCar
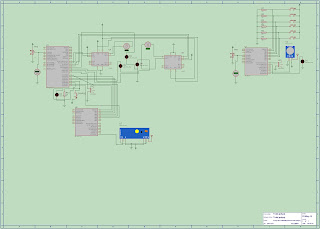
Smart ToyCar: MikroC Code For Reciver: //PIC16F877A //12MHz float reading=0 , act_reading=0, volt=0; void Get_Volt(void) { adcon1=0b0000; delay_ms(50); reading=Adc_Read(0); act_reading=(reading*5)/1024; volt=act_reading*2.25; //volt_in } void Tone() //horn { Sound_Play(500, 10); } void Tone_back() { Sound_Play(2000, 300); delay_ms(200); ...